皮帶輸送機巡檢機器人 | 智能安全巡檢機器人 | 防爆巡檢機器人 | 智能視頻巡檢機器人 | 智能視頻巡檢機器人 | 變電站巡檢機器人 | 園區巡檢機器人 | 機房巡檢機器人 | 變電站智能巡檢機器人 | 軍警巡邏抓捕機器人 | 復合型機器人 | 安防巡邏機器人 | 變電站智能巡檢機器人 | 輪式智能巡檢機器人 | 定軌巡檢機器人 | 定點機器人 | 機房智能巡檢機器人 | 智能巡檢機器人 | 掛軌巡檢機器人 | 防爆輪式巡檢機器人 | 全地形消防滅火機器人 | 消防排煙滅火機器人 | 室外輪式巡檢機器人 | 智能防爆輪式巡檢機器人 | 煤礦履帶式巡檢機器人 | 消防排煙滅火機器人 | 工業爬行機器人 | 管道檢測機器人 | 焦爐巡檢機器人 | 警用偵察機

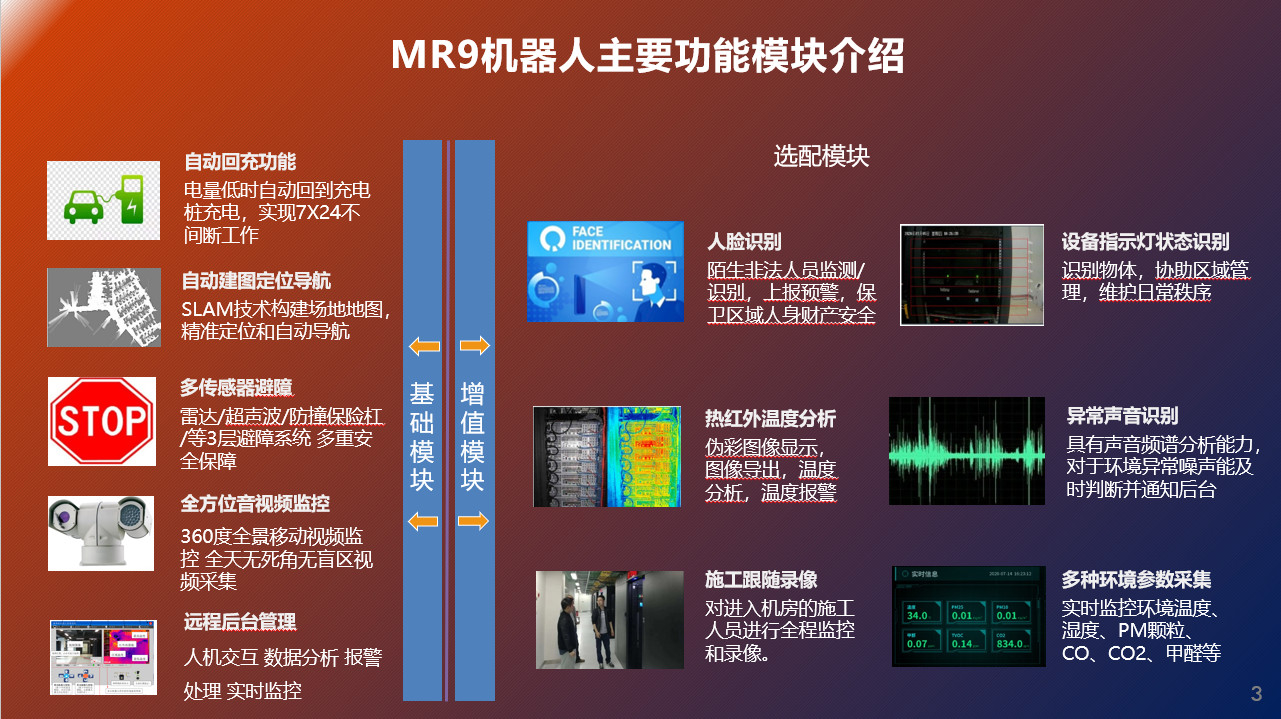
| 基本巡檢功能 | 自主定位導航/設備狀態識別/遠程視頻監控/自主定時巡檢/自動充電/巡檢報告生成 |
| 推薦使用場所 | IDC數據中心機房 企業服務器機房 計算機機房 大型配電機房等 |
| 結構尺寸和重量 | 高度在0.67~2.0米之間可自動升降,底盤大小53X45CM,重量40KG(含內置電池) |
| 定位和導航方式 | 默認基于SLAM算法的自選路徑導航方式, 特殊場地可以輔助部署UWB |
| 運動底盤及驅動 | 雙輪差速驅動,電機采用一體化2X200瓦輪轂電機,內置減速器,高效能低噪音 |
| 視頻圖像采集 | 采用4K高清像素ONVIF協議高清IPC黑光級攝像頭,圖像質量可達3840X2160像素 |
| 紅外熱圖像采集 | 工業自動化領域專業紅外熱成像儀,測溫度范圍-20~450攝氏度 |
| 其他測量傳感器 | 環境溫度、濕度、煙霧、PM污染顆粒、CO2、噪聲分貝、聲音頻譜 |
| 機器人硬件平臺 | 主控板為PC工控機架構,CPU為酷睿I5處理器,8G內存,輔控制板為ARM架構 |
| 機器人軟件系統 | 主操作系統為LINUX,由ROS體系組成機器人各功能模塊軟件之間的通信和協作 |
| 圖像識別AI算法 | 采用機器視覺AI識別算法, 實現人臉識別、儀表識別、指示燈狀態識別等 |
| 遠程控制網路架構 | 采用WIFI或4G、5G無線通信架構連接,可工作在局域網或廣域網場合 |
| 客戶端監控軟件 | 提供客戶端監控軟件DEMO源碼,操作系統為WIN7或以上,可供SDK供客戶二次開發 |
| 機器人運動指標 | 巡航速度0.2~1.0米/秒可選,最大爬坡角度為10度,最小轉彎半徑為0.35米 |
| 攝像頭云臺運動 | 水平旋轉角-180~+180度,俯仰旋轉角-50~+80度,光學攝像頭和紅外攝像頭同步 |
| 機器人運動避障 | 依靠激光雷達掃描、超聲波探測、機械防撞開關三重避障機制,確保機器人安全行走 |
| 內置電池規格 | MR9巡檢機器人的標配內置電池為24V/14AH磷酸鐵鋰電池組 |
| 機器人自動充電 | 任務結束后機器人會自動返回充電樁進行電力補充,無需人員干預。7X24小時工作 |
| 連續最大行走距離 | 對于充滿電的機器人,可連續行走5000M(0.3米/秒的典型巡航速度) |
| MR9外形結構圖示 |

|
| 客戶端監控頁面 |
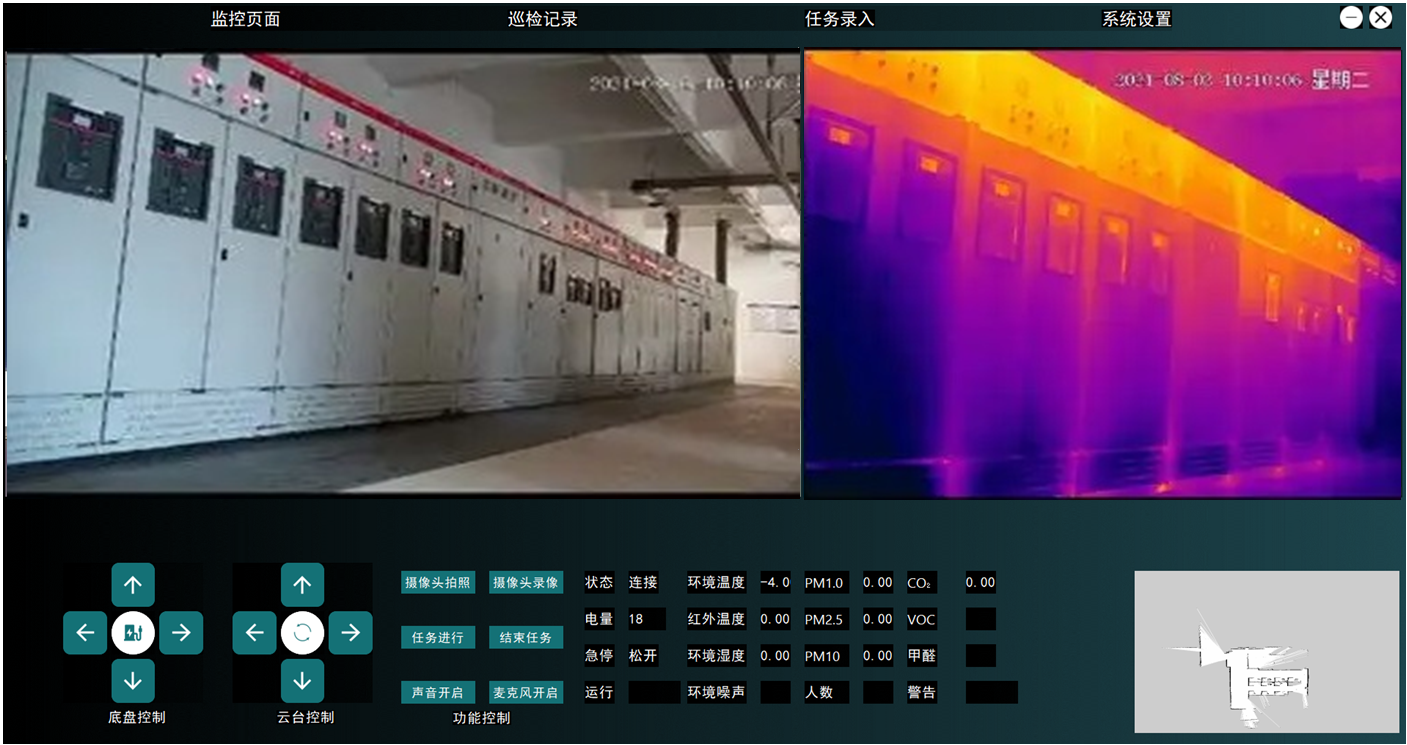 |



